Robots by Selection
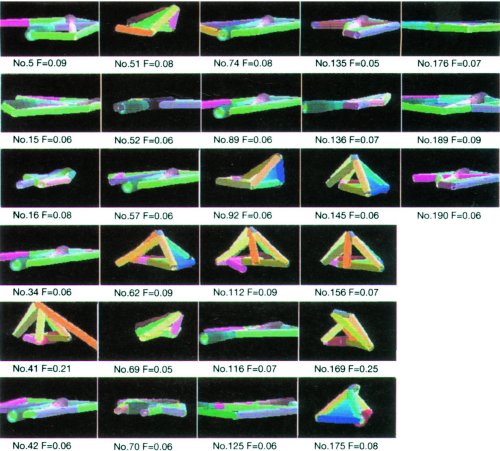
Figure WN17.2.
Robots with diverse ways of “walking” evolved by selection between alternative designs. The robots were built from a set of standard bars, actuators, and control elements (analogous to bones, muscles, and neurons) and were constructed automatically. Starting from the most basic structure, random mutations were made, and the resulting structures were selected for their speed of movement. (From Lipson and Pollack 2000, Fig. 3.)
|


